1.动力学模型
根据《飞行器控制系统》书籍可以得到如下关系式
-
力方程组
⎩⎪⎨⎪⎧u˙=vr−wq−gsinθ+mFxv˙=−ur+wp+gcosθsinϕ+mFyw˙=uq−vp+gcosθcosϕ+mFz
-
运动方程组
⎩⎪⎨⎪⎧ϕ˙=p+(rcosϕ+qsinϕ)tanθθ˙=qcosϕ−rsinϕψ˙=cosθ1(rcosϕ+qsinϕ)
-
力矩方程组
⎩⎪⎨⎪⎧p˙=(c1r+c2p)q+c3Lˉ+c4Nq˙=c5pr−c6(p2−r2)+c7Mr˙=(c8p−c2r)q+c4Lˉ+c9N
-
导航方程组
⎩⎪⎨⎪⎧p˙=(c1r+c2p)q+c3Lˉ+c4Nq˙=c5pr−c6(p2−r2)+c7Mr˙=(c8p−c2r)q+c4Lˉ+c9N
其中c1=Σ(Iy−Iz)Iz−Ixz2,c2=Σ(Ix−Iy+Iz)Ixz,c3=ΣIzc4=ΣIxz,c5=IyIz−Ix,c6=IyIxz,c7=Iy1c8=ΣIx(Ix−Iy)+Ixz2,c9=ΣIx,Σ=IxIz−Ixz2
⎩⎪⎨⎪⎧Lˉ=p˙Ix−r˙Ixz+qr(Iz−Iy)−pqIxzM=q˙Iy+pr(Ix−Iz)+(p2−r2)IxzN=r˙Iz−p˙Ixz+pq(Iy−Ix)+qrIxz
关系式确定了状态向量x=[uvwϕθψpqrxgygh]T与控制输入向量u=[δTδeδaδr]T之间的非线性函数的关系(????),所描述的12个方程都是封闭的。只要已知飞行器相关的特征参数,再根据飞行高度h,马赫数Ma以及飞行状态,就可以确定力(Fx,Fy,Fz)和力矩(Lˉ,M,N)
2.问题建模
2.1组合优化问题
需要解决的问题是构建不定长的$A_{aim}=\left{ a_1,a_2\cdots ,a_n \right} $决策序列来使飞行器之间的位置关系达到某种状态。
对于静态和确定环境,比如敌方飞行器按照固定模式进行飞行,所有信息已知进行快速求解。可以建模为一个组合优化问题
⎩⎪⎪⎨⎪⎪⎧minf(x)s.t.g(x)≥0x∈D
其中X为解空间,f(x)为目标函数。‘
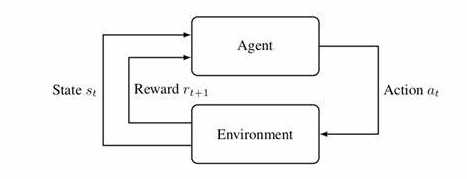
2.2马尔可夫决策过程问题
但是由于本论文对方的动作是无法自己是无法得知的,是一个动态而且随机的环境,但是可以得知未来的状态可以由当前状态和动作决定。所以,将其建模为一个马尔可夫决策过程(MDP)问题。马尔可夫过程由一个4元组构成(S,A,T,R)
- S是一个有限集(是否意味着连续状态空间的算法会有问题?),其中每个元素代表一个状态
- A是一个有限集(是否意味着连续状态空间的算法会有问题?),其中每个元素代表一个行动
- T是状态转移函数,将每个“状态行为”映射为S的一个概率分布。
- R是回报函数,表示在s上执行a所得到的即时回报。
MDP问题的目标是求解最优策略让回报最大化。
3.问题求解



