LSTM理论与实践
1.LSTM原理
设循环神经网络t时刻的隐变量可以表示为,其隐变量更新公式如下,
其中为激活函数,共有两套权重参数。分别为输入权重和隐变量权重。
RNN的输出可以表示为:
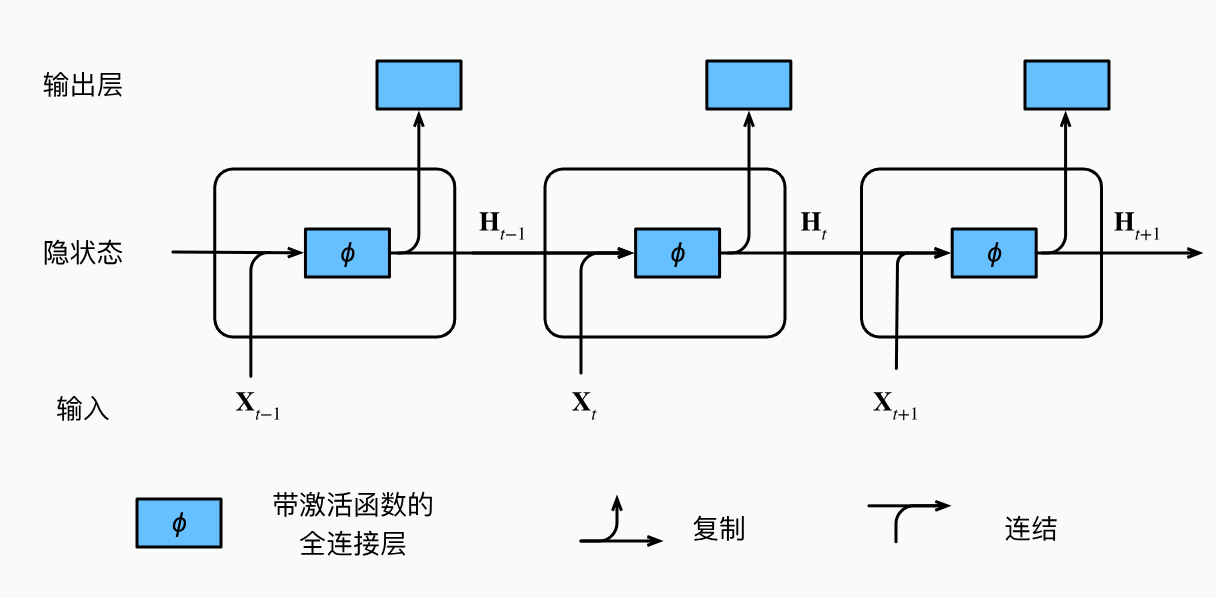
根据上述公式可以得到RNN的图示如下。
其底层代码实现如下:
假设、、和的形状为(3,1)、(1,4)、(3,4)和(4,4)。
import torch
def rnn(inputs, state, params):
# inputs的形状:(时间步数量,批量大小,词表大小)
W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
# X的形状:(批量大小,词表大小)
for X in inputs:
H = torch.tanh(torch.mm(X, W_xh) + torch.mm(H, W_hh) + b_h)
Y = torch.mm(H, W_hq) + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)
def train_epoch_ch8(net, train_iter, loss, updater, device):
state = None
for X, Y in train_iter:
if state is None:
# 在第一次迭代或使用随机抽样时初始化state
state = net.begin_state(batch_size=X.shape[0], device=device)
else:
state.detach_()
y = Y.T.reshape(-1)
X, y = X.to(device), y.to(device)
y_hat, state = net(X, state)
l = loss(y_hat, y.long()).mean()
if isinstance(updater, torch.optim.Optimizer):
updater.zero_grad()
l.backward()
grad_clipping(net, 1) #梯度裁剪,防止梯度爆炸
updater.step()
metric.add(l * y.numel(), y.numel())
return math.exp(metric[0] / metric[1])


